车辆行驶的路径监控十分关键,它直接影响着驾驶的安全性以及导航的准确性。我们运用了横竖双向的控制技术和PID控制策略,旨在确保轨迹跟踪的精确度,从而提升出行的舒适体验。然而,这种方法的实际效果究竟如何?我们不妨来详细研究一下。

路径跟踪控制核心
车辆路径跟踪的关键是对主车进行精确的上下和左右操控。上下操控需要精细调整主车的加速,确保车辆能以预定速度行驶。左右操控则是调整主车的转向,保证车辆能沿着既定路线前进。运用车辆运动学原理,我们能够精确实施这两项操控。运用PID控制策略,可以构建出高效的路径跟踪控制器,进而实现系统的闭环仿真和评估。
运动轨迹估计
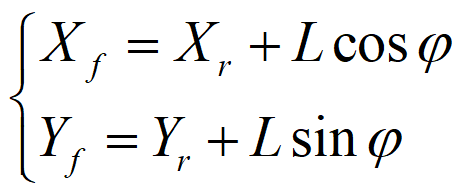
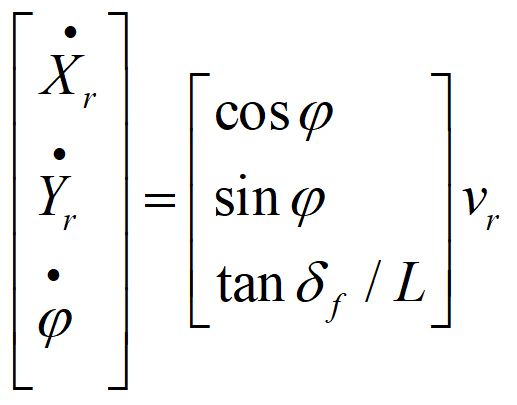
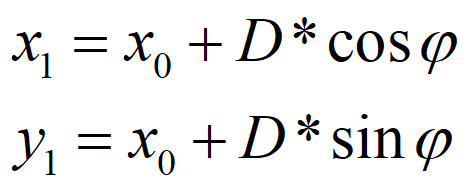
借助车辆运动学模型,我们得以确定车辆行驶路径上各点的具体位置。根据状态方程,所需输入数据有前轮转向角和后轴转速,而状态参数则涵盖横向和纵向位移及车辆航向。在本研究中,我们提出了预瞄控制理念,依据车辆预览点的实时状态,以此为基础构建了PID控制器。该轨迹由一百个单独的小点组成。通过for循环的使用,我们能够依次计算目标点与轨迹上各个点的间距,从而确定距离最近的那一点的具体位置。
横向误差计算
横向误差并非指的是纵坐标的差异,而是指从预瞄点到轨迹上最近点的距离。这种误差可以通过比较距离的平方来直接计算,这样的计算方式比较简单。只需要计算预瞄点到轨迹上各点的距离平方,就能得到横向误差的确切数值。进行精确的横向偏差测量,能让我们对PID控制进行更精确的调整。这样,我们就能更细致地控制方向盘或前轮的转向,保证车辆的行驶轨迹与既定目标相符。
航向误差获取
为确保航向偏差的准确判断,需辨别预定航线上各节点理想航向与实际航向的偏差。由于节点分布较为分散,我们运用MATLAB的曲线拟合工具箱进行匹配,发现正弦曲线最为贴合。接着,对每个x值求导,再进行反正切运算,得到各节点的航向角度。最后,我们得出了航向误差的计算结果。
横向PID控制

依据横向与航向的偏差,实施PID调节。在PID调节过程中,要持续调节误差的比重、累加值和变化率,以确保对系统实施精准操控。精准操控方向盘或前轮的转向,能使车辆在横向移动时更贴近既定路径,进而提高路径追踪的精确度。
车辆纵向控制系统主要保障车辆在行驶过程中能精确匹配速度。在车辆启动或抵达指定位置时,速度被设定为零。行驶过程中,车辆需保持既定的速度Vset。临近目的地时,速度应逐渐降至零。该系统属于单输入单输出类型,通过追踪速度偏差进行调节,确保对速度进行精确控制。车辆需依据既定的距离准则来判定其与目标点的远近,再据此计算出与目标点之间的确切距离。接着,依据这个距离值,对速度误差实施PID调整。通过这种方式,车辆能够精确地追踪并操控既定的路线。
使用这套基于PID控制算法的车辆路径跟踪系统,我们可能会面临哪些困难?您可以在评论区发表您的看法。若这篇文章给您带来了一些启发,请不要忘记点赞和转发!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.mayuv.com/html/tiyuwenda/9814.html