自动驾驶技术中,坐标系的运用和车辆模型的建立既复杂又关键。若对这些概念不甚了解,理解与实践自动驾驶技术将会遇到诸多难题。下面,我们将对这些核心知识点进行详细阐述。
旋转角正负规则

旋转角度的正负问题看似复杂,但只需记住一个要点便可轻松应对。在左手坐标系里,若从轴向原点看去,顺时针方向就是旋转的正方向。百度Apollo的代码中运用了左手坐标系,这会影响到轮胎侧偏的数值。例如,它将轮胎侧偏刚度视为正值,而在右手坐标系中同一侧偏角为负,在左手坐标系中则为正,这最终会导致计算出的侧向力结果出现差异。
左右手坐标系差异
左右手坐标系存在显著差异。在不同的坐标系中,相同的物理量可能会呈现出不同的数值和方向。例如,我们之前提到的轮胎侧偏角和侧偏刚度,它们在不同坐标系中的表现就各不相同。掌握这两种坐标系对于研究自动驾驶至关重要,因为它们在后续的计算和判断中扮演着关键角色。
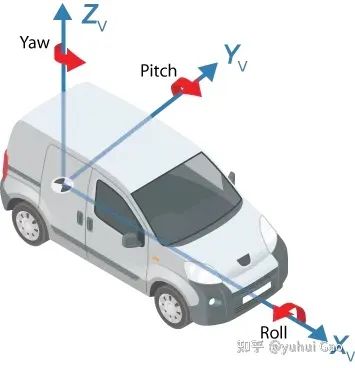
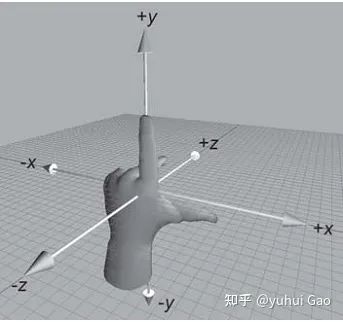
车辆坐标系定义
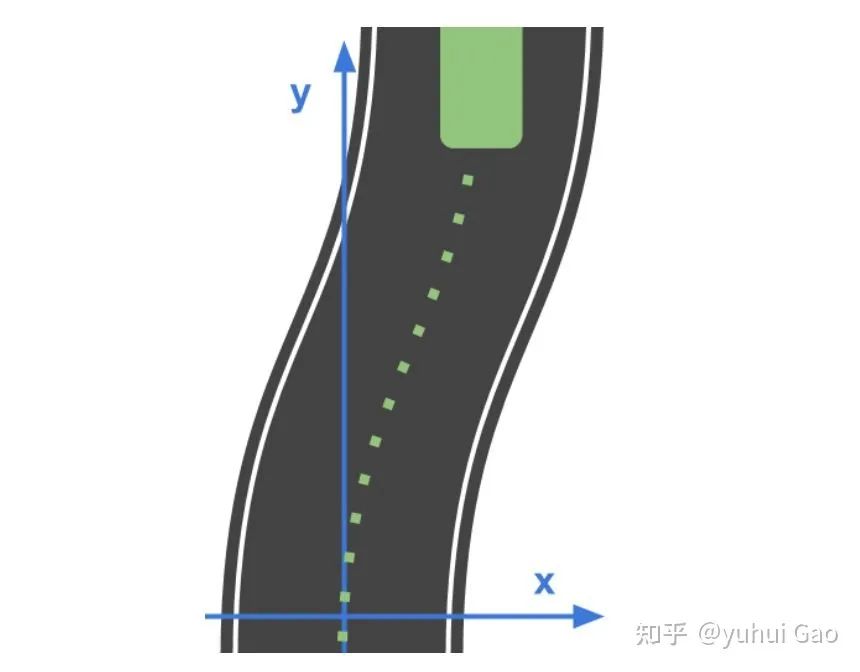

车辆坐标系的原点通常设在车辆的质心或后轴中心。假设你是一名驾驶员,面向前方时,X轴即为正方向;转向左边,Y轴便是正方向;抬头向上,Z轴则是正方向。在测量角度时,我们以右手坐标系为标准,视线从轴的正方向指向原点,逆时针旋转的方向被视为正值。这样的设定便于描述车辆的具体位置和方向,并且是众多后续模型推导的基础。
车辆位置数学描述
车辆以恒定速度v₀前进时,我们能够用数学方法来描述其位置。虽然具体的公式没有详细展示,但在研究过程中,通过恰当的假设和推演,我们能够用数学表达式精确地计算出车辆在各个时间点的具体位置。这一做法对于自动驾驶的路径规划和控制至关重要。
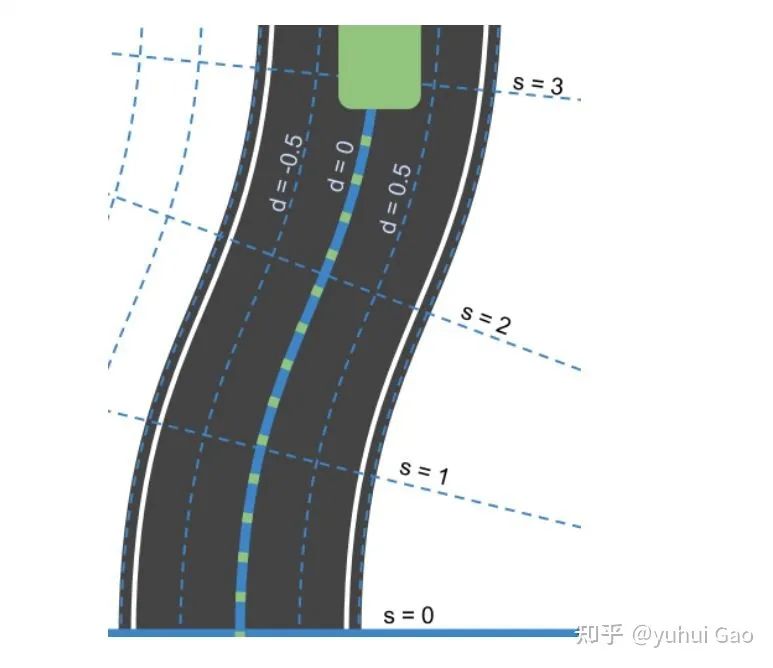

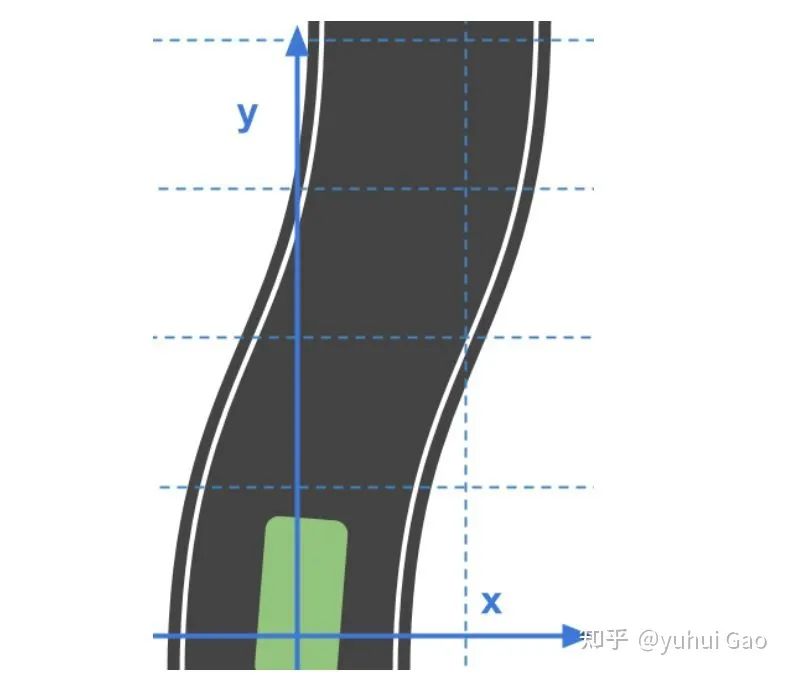
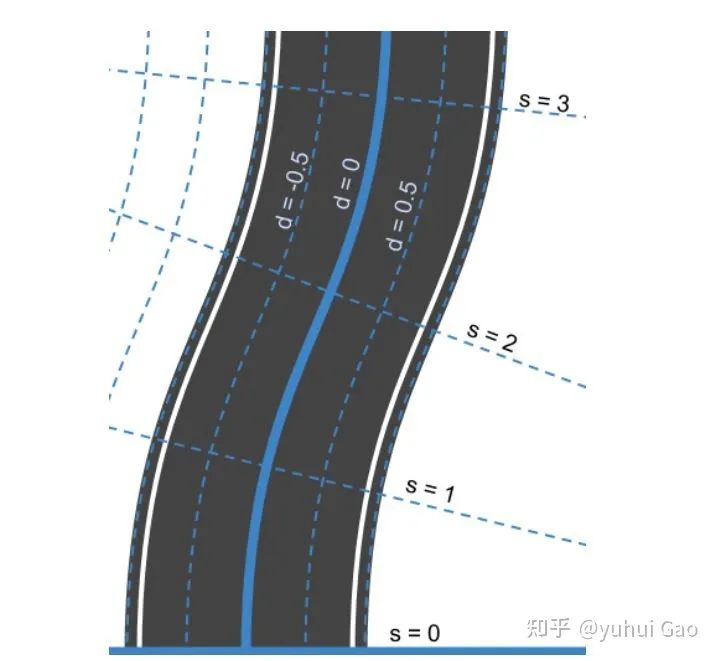
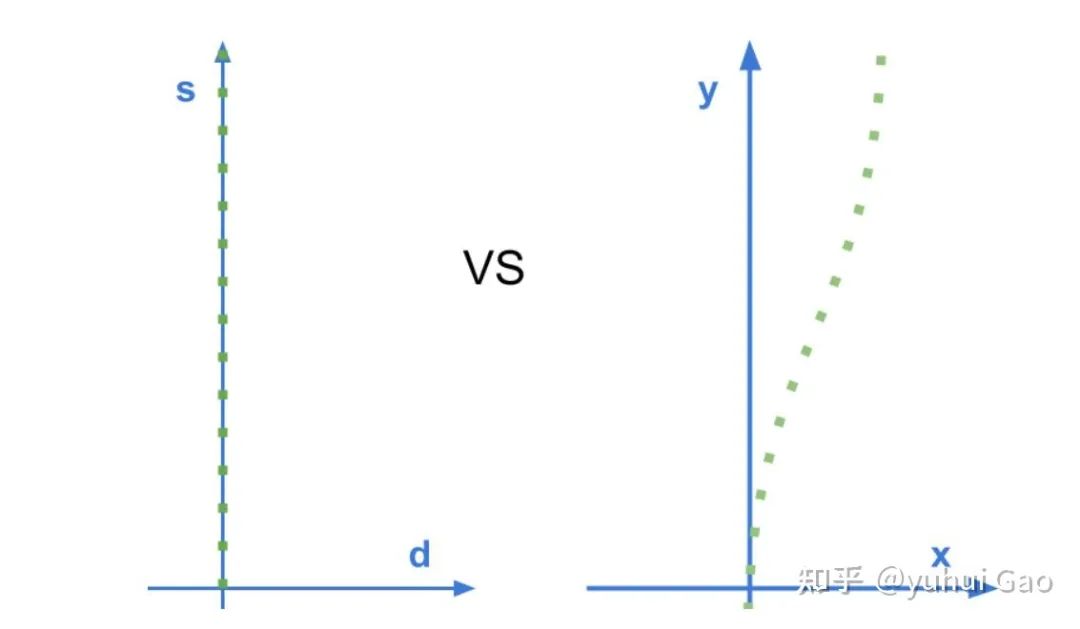
Frenet坐标系作用
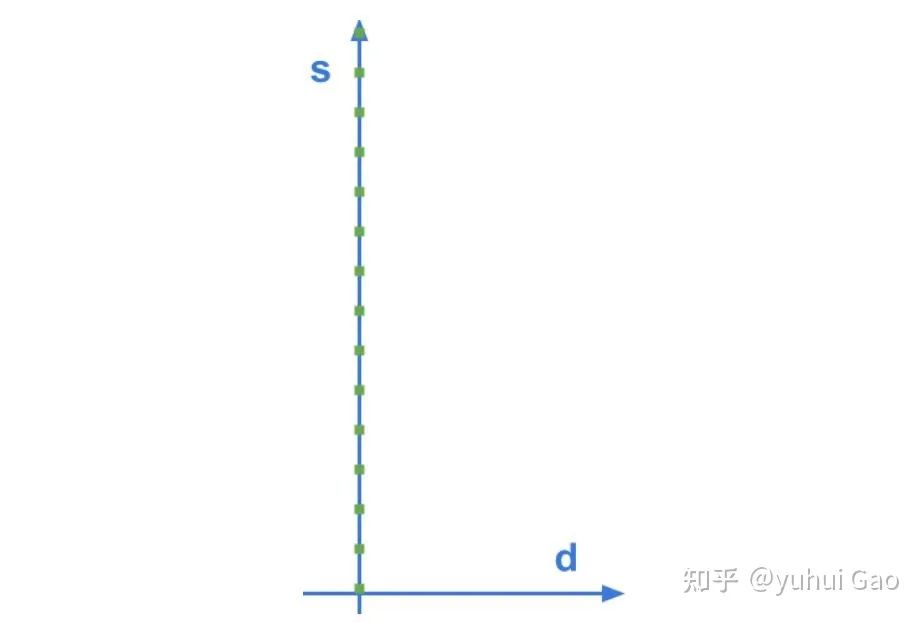
Frenet坐标系可以将车辆的上下和左右移动分开处理,还能在地球坐标系和Frenet坐标系之间进行转换。这种转换需要运用不少数学知识,但它的优点很明显。它能让我们更方便地分析车辆各自的运动,控制它们,从而提升自动驾驶的准确性。
车辆运动学模型
研究车辆运动学模型关注物体在空间中的位置与姿态。若车辆沿直线行驶,其位置变化可通过速度与时间的乘积得出;而在非直线行驶中,通过速度与方向盘转角等因素,可计算出新的位置。此模型基于一系列假设,例如在低速行驶时,车辆无横向速度分量,质心侧偏角β接近于零,航向角θ与车辆的横摆角φ相等。模型结构相对简单,常用于低速行驶情况下的设计。研究自动驾驶时,大家是否觉得那些坐标系统和模型挺难理解的?赶紧行动起来,点赞、转发文章,并在评论区留下你的观点!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.mayuv.com/html/tiyuwenda/9810.html